韩国蔚山国家科学技术研究所(UNIST)的研究人员开发出一个名为UNIclimb的3D打印爬墙机器人。它有四足,模仿了壁虎攀爬陡峭表面和防水的功能,能“在任何方向的表面上攀爬;有一个结构、运动机制、攀爬能力和类似于壁虎的表面功能”。这项研究已经发表,题为“具有优异防水性和爬墙及天花板功能的3D打印四足机器人”。

机器人的身体是用3D Systems的选择性激光烧结机器sPro 60 HD-HS打印的,打印材料为聚酰胺12,一种通常用来生产功能部件的尼龙材料。打印完成后,研究团队将设备组装好,没用到胶水或粘合剂。安装在机器人手臂和脚上的粘附垫让其能像壁虎一样行动。垫子是用一种复制成型技术制成的,涉及从一个预制模具上剥离下粘性垫。机器人由伺服电机驱动,一个Arduino微控制器控制着这些项伺服电机。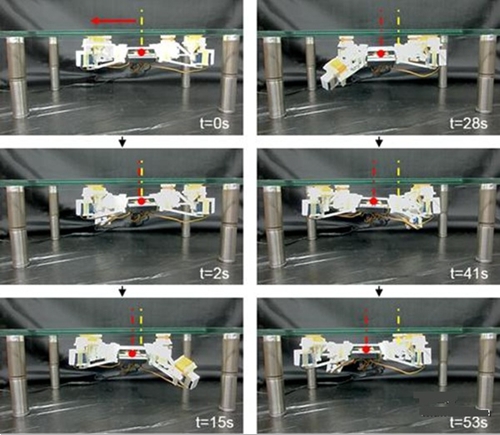
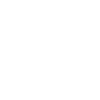
为了让机器人能在雨中甚至水下运作,研究人员给机器人的身体(包括伺服电机)涂上了一层二氧化硅纳米颗粒。通过对机器人进行水下测试,他们成功评估了这一功能。机器人还能在垂直的玻璃表面以及以背朝下的姿势正常运作,证明了自己的天花板行走能力。面对这些初步成功,研究人员感到很高兴,并说未来的工作将涉及提高运动速度、垫子的粘附效果以及疏水涂层的稳定性。他们的最终目标是开发一个能用于空气和水污染监测的实用机器人。





 大家都在看
大家都在看




 3D打印直通车
3D打印直通车 上传STL文件
上传STL文件 挑选模型
挑选模型
 热门标签
热门标签 精选文章
精选文章
 推荐模型
推荐模型