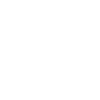
虽然深海 - 黑暗,寒冷,高压和无气 - 对人类来说是不适合的,但它充满了在恶劣环境中茁壮成长的微妙生物。研究这些生物需要安装在可以承受这些条件的遥控车辆(ROV)上的专用设备。然而,这些装置主要设计用于海上能源工业或军事应用,并且通常不适合与软体和高度脆弱的生物体相互作用。
精致的海参,深度为1282米
现在,由工程师、海洋生物学家和机器人专家组成的团队已开发出一种柔软,灵活且可定制的替代采样装置,使科学家能够从海中轻轻抓取不同类型的生物而不会伤害它们。此外,软机器人操纵器的3D打印能够实现高度偏远地区的工具的实时制造和修改。
该团队的论文于8月1日在开放获取期刊PLOS ONE上发表。
团队设计的“软抓手”设备有两到五个“手指”,由聚氨酯和其他柔软材料制成,通过低压液压泵系统打开和关闭,该系统使用海水驱动其运动。夹子连接到一个木球上,该木球使用ROV现有的硬爪式工具固定和操纵,该工具由ROV系在其上的船上的操作人员控制。

完全3D打印版本的夹具
“我们在深海遇到的许多动物都是新物种,这些软机器人让我们能够精心互动并研究更多样化的动物群,”David Gruber说,他是一篇关于该研究新论文的合著者。
在2017年10月5日至11月2日对凤凰群岛保护区进行的深海探险中,该团队使用其软夹具通过遥控车辆(ROV)对2224米以下的物种进行取样。机组人员在他们的船上使用了两台3D打印机来动态构建新组件。
“通过在海上进行3D打印,我们可以在飞行中进行创新,并提出柔软的机器人技术,以便与以前未经检验过的柔软细腻的动物进行互动 - 因为它们太脆弱了,”David Gruber说。
“在船上停留一个月意味着我们必须能够制造出我们需要的任何东西,事实证明,3D打印机在船上做得非常好。我们让它们几乎全天候运行,我们能够从ROV操作员那里获得有关他们使用软夹具的经验的反馈,并在一夜之间制造新版本以解决任何问题,“Wyss Institute的研究工程师Daniel Vogt说。
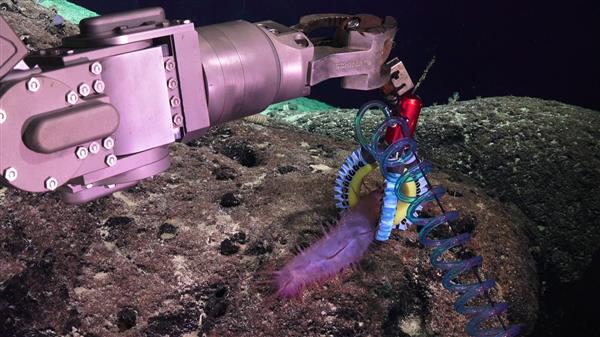
仅具有两个手指的夹具的修改版本可以执行用于保持大物体的“动力抓握”和用于保持小物体的“夹紧抓握”,非常像人手
据报道,软夹具能够比传统的水下取样工具更有效地收集海slu ,,珊瑚,海绵和其他海洋生物,并且损失更小。根据ROV操作员的意见,团队3D打印的“指甲”扩展可以添加到抓手的手指上,以帮助他们获得附在坚硬表面上的样本。这种改进使得能够成功地抓住诸如海参之类的脆弱动物,这些动物历史上难以使用刚性机械臂和抽吸采样器进行无损伤收集。此外,每个手指还添加了一个柔韧的网状物,以帮助保持手指握在手指内。

该团队正在进一步开发夹具,希望添加传感器,当夹具与生物体接触时,可以向ROV操作员指示,“感觉”它有多硬或多软,并进行其他测量。最终,目标是捕获深海中的海洋生物并获得完整的物理和遗传数据,而无需将它们从原生栖息地中移除。
“由于对世界偏远地区的科学考察成本高昂且计划冗长,软机器人操纵器的即时打印提供了一种实时解决方案,可以更好地理解并与微妙的深海环境相互作用,柔软、脆弱,以及其他脆弱的生物,“Vogt等人说。 “这也提供了一种与侵入性较慢的深海生物相互作用的侵入性较小的手段,其中一些可能长达18000年。”





 大家都在看
大家都在看




 3D打印直通车
3D打印直通车 上传STL文件
上传STL文件 挑选模型
挑选模型
 热门标签
热门标签 精选文章
精选文章
 推荐模型
推荐模型