北卡罗来纳州立大学的一项研究调查了可以用磁场控制的3D打印软机器人的过程。软机器人是一个子领域,机器人物体由模仿生物体组织的材料构成,它们通常在不使用电机或伺服电机的情况下实现运动。3D打印机是软机器人工程师的理想工具,因为它们的工作高度依赖于使用3D打印机擅长生产的特定几何形状和材料混合物。
“这项研究显示了3D打印与软机器人相结合的新兴领域的能力,”北卡罗来纳州立大学化学与生物分子工程教授,该论文的通讯作者Orlin Velev说。
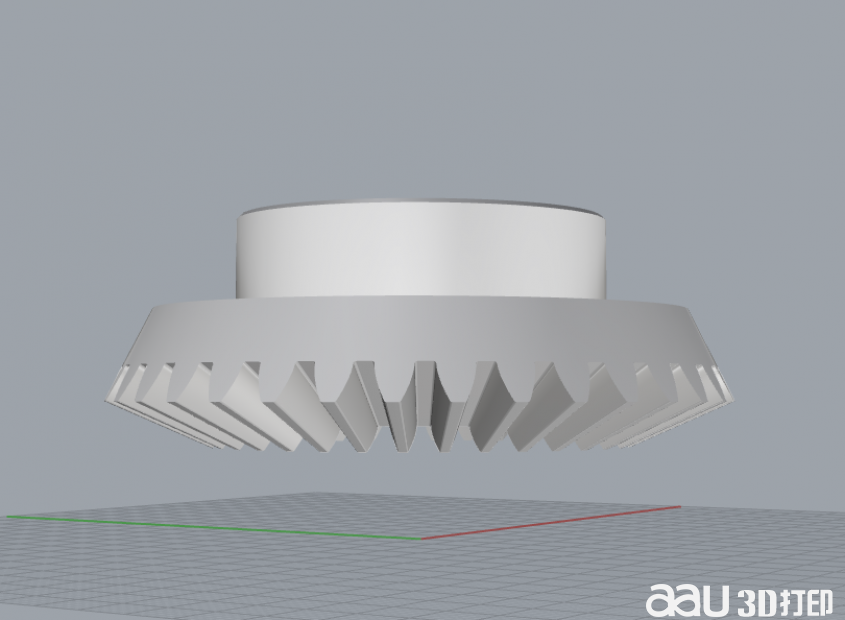
北卡罗来纳州立大学的团队将铁颗粒注入有机硅基“同型复合触变膏”中,然后将3D打印的手风琴状网状物注入其中。 “这种自增强粘贴使我们能够创造出超柔软和柔韧的结构,”Velev实验室的NC州博士生和该论文的第一作者Sangchul Roh说。
“嵌入羰基铁颗粒,广泛使用并具有高磁化强度,使我们能够对磁场梯度产生强烈反应,”该项目的材料科学与工程教授兼高级共同研究员Joseph Tracy补充道。当将定向磁场施加到3D打印物体时,它们相应地打开和关闭。
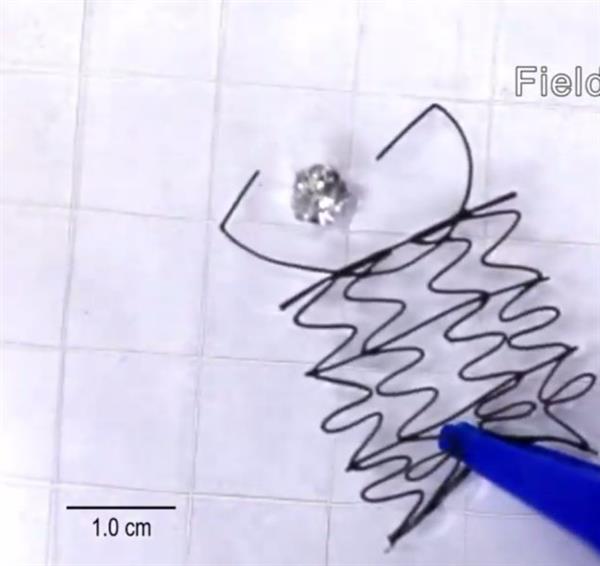
“这些结构也是拉胀的,这意味着它们可以向各个方向扩展和收缩,”Velev阐述道。 “通过3D打印,我们可以在施加磁场之前和之后控制形状。”网状物漂浮在水面上,这也为软机器人提供了低阻力环境。他们展示了机器人抓住一小块铝箔球以及携带和沉积一滴水。
这样的3D机器人可以制造成海洋清理无人机,在水上抓取塑料和碎片,以便以后回收和处理。然而,研究人员看到更多雄心勃勃的应用,Roh评论说,“模仿体内的活体组织是这些结构的另一种可能应用。”





 大家都在看
大家都在看




 3D打印直通车
3D打印直通车 上传STL文件
上传STL文件 挑选模型
挑选模型
 热门标签
热门标签 精选文章
精选文章
 推荐模型
推荐模型