代尔夫特理工大学的研究人员不仅开发了一种优化结构及其制造顺序的新方法,而且主要作者还因其令人印象深刻的“空间”而获得了国际结构与多学科优化协会(ISSMO)的ISSMO / Springer奖。增材制造的时间拓扑优化:结构布局和制造顺序的并发优化,最近发表在《结构和多学科优化》杂志上。
王为民博士的研究获奖,他于2019年5月在北京举行的第13届世界结构与多学科优化大会(WCSMO)上做了演讲。他将在2021年WCSMO-14大会上正式获得ISSMO / Springer奖。机器人辅助增材制造工艺在这项新工作中起着重要作用,涉及两个设计变量:定义布局的密度场和用于生成中间结构的时间场。需要优化的结构可能非常复杂,需要“附加约束”才能进行制造和建造。但是,这些限制实际上会危及结构。
研究人员指出,在这些领域已经取得了很大的进步,但是直到现在,还没有同时进行优化和结构制造。“所提出的方法与增材制造的最新进展形成了完美的匹配,增材制造使柔性制造能够超越连续的平面层。”时空拓扑优化包括对整体结构的评估,但包括过程的“不完整”部分以及中间阶段。为了使用这种新系统,研究人员提出了用机器人技术建造桥梁的想法。随着“重型机器人”的发展,它们不仅可以确保桥梁坚固,而且能够在制造过程中承受机器人的重量。
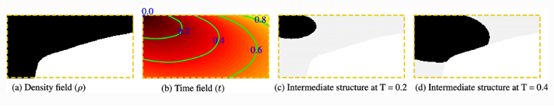
离散密度场(a),连续时间场(b)以及在T = 0.2(c)和T = 0.4(d)处产生的中间结构的示意图。为了便于说明,在(c)和(d)中以灰色示出了整个结构。设计域的外部轮廓由橙色虚线表示。
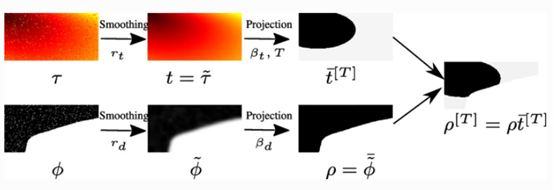
密度场(底部),时间场(顶部)以及用于指定中间结构的相应过滤和投影操作的图示(右)
为了防止形成孤立的材料补丁,研究人员集中于改进增量增材制造加工,在该过程中,其中一层将要被沉积到下一层。研究人员解释说:“在制造过程中,隔离的材料补丁可以与时间字段中的局部最小值相关联;它所有相邻的元素都具有较大的时间值,因此将在以后制造。”以不同的制造起点(蓝色区域)生成的时间字段和结构。从上到下:初始时间字段(由与起点对应的距离字段构成),优化时间字段和优化结构。黑色曲线表示在不同制造阶段制造的相邻部件之间的边界。在该测试中,阶段数为8,不是设计变量,而是规定的。因此,确定Ti,用于分割时间字段的值。右侧的色条指示时间值。(此色标在本文中也始终用于其他图形)

平台的自重会随着其增长而对结构产生影响,并且在增材制造过程中,诸如热塑性聚氨酯之类的材料可能会产生很大的变形。
由机器人平台制造的桥梁。在建桥梁应在所有中间阶段支撑可移动机器人平台。图片由MX3D提供(www.mx3d.com)
优化中使用了四个不同的加权因子(αi= 0.001、0.1、0.4和0.6),研究人员指出:“随着自重的增加,溶液的特征在于附近的固体元素数量增加设计域被分为12个部分,研究团队需要找出每个子域的实体元素数量。机器人应该以连续的动作工作,从左上角开始,然后向右移动,将每个区域的物料放置在其范围内。如果过程顺利进行,则应在每个区域中以相同的速度沉积相同数量的材料,并使用与时间有关的材料来施加与过程有关的负载。
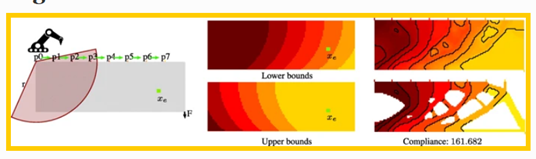
左:机器人打印机平台在顶部(左)上沿结构从左向右移动。中:制造时间的上限和下限。右图:优化的时间字段,并且优化的密度字段带有时间字段的颜色。制造阶段数为8,αi= 0.5。最终结构的合规性在底部列出
显然,这些例子绝不是关于配方潜力的穷举。研究人员总结说:“一些关键参数的收敛性和影响力通过广泛的参数研究得到了评估。”“拟议的配方为拓扑优化和先进制造技术的集成开辟了新的方向。将此公式从2D扩展到3D很简单。在将来的工作中,我们特别希望考虑高度依赖于制造顺序的制造引起的失真。”尽管这个新颖的概念极富创新性,但当今的研究人员正在将机器人技术纳入他们的大部分工作,从将制造提升到4D的新高度,再到集成软机械材料,传感器等。





 大家都在看
大家都在看





 3D打印直通车
3D打印直通车 上传STL文件
上传STL文件 挑选模型
挑选模型
 热门标签
热门标签 精选文章
精选文章
 推荐模型
推荐模型